-
×
 Tubo de Teflón PTFE 2x4mm 1 Metro para Filamento 1.75mm
1 × $ 41.00
Tubo de Teflón PTFE 2x4mm 1 Metro para Filamento 1.75mm
1 × $ 41.00 -
×
 UShieldX Shield de Expansión para Arduino UNO
1 × $ 456.00
UShieldX Shield de Expansión para Arduino UNO
1 × $ 456.00 -
×
 Antena WiFi SMA Macho 5dB
1 × $ 31.00
Antena WiFi SMA Macho 5dB
1 × $ 31.00 -
×
 Cargador Batería LiPo USB
1 × $ 17.00
Cargador Batería LiPo USB
1 × $ 17.00 -
×
 ESP32-CAM OV2640 con CH340 WiFi Bluetooth
1 × $ 244.00
ESP32-CAM OV2640 con CH340 WiFi Bluetooth
1 × $ 244.00 -
×
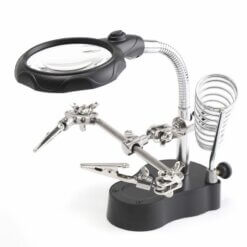 Lupa Con Luz Led Pinzas Base Para Cautín Reparar
1 × $ 139.00
Lupa Con Luz Led Pinzas Base Para Cautín Reparar
1 × $ 139.00 -
×
 Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00 -
×
 Kit Robotuga STEAM
1 × $ 220.00
Kit Robotuga STEAM
1 × $ 220.00 -
×
 Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00
Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00 -
×
 RTT06470JTP Resistor 47 Ohms 1/4W 1206 SMD
1 × $ 1.00
RTT06470JTP Resistor 47 Ohms 1/4W 1206 SMD
1 × $ 1.00 -
×
 UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00
UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00 -
×
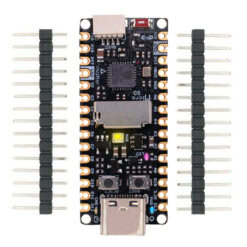 UNIT Pulsar ESP32-C6
1 × $ 189.00
UNIT Pulsar ESP32-C6
1 × $ 189.00
Puede que estés interesado en…
-
Add
 E01C-ML01DP5 Modulo Inalambrico RF
$ 89.00
E01C-ML01DP5 Modulo Inalambrico RF
$ 89.00 -
Add
 UNIT Cargador de Batería LiPo Boost & I2C
$ 69.00
UNIT Cargador de Batería LiPo Boost & I2C
$ 69.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Llanta Omnidireccional Derecha y Izquierda
Rango de precios: desde $ 114.00 hasta $ 198.00
Llanta Omnidireccional Derecha y Izquierda
Rango de precios: desde $ 114.00 hasta $ 198.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Hélice de 3 y 4 Aspas para Eje 2mm
Rango de precios: desde $ 8.00 hasta $ 10.00
Hélice de 3 y 4 Aspas para Eje 2mm
Rango de precios: desde $ 8.00 hasta $ 10.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Tira Header Hembra 2.54mm Diferentes Pines
Rango de precios: desde $ 2.00 hasta $ 5.00
Tira Header Hembra 2.54mm Diferentes Pines
Rango de precios: desde $ 2.00 hasta $ 5.00

























Valoraciones
No hay valoraciones aún.