-
×
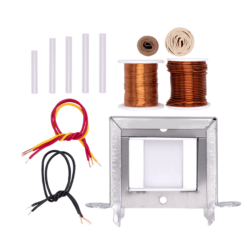 Kit Transformador de 127V a 12VCA 1A
1 × $ 213.00
Kit Transformador de 127V a 12VCA 1A
1 × $ 213.00 -
×
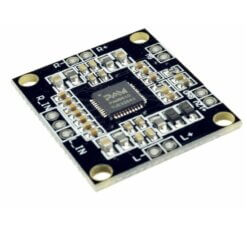 PAM8610 Amplificador Estéreo 2x15W 12V
1 × $ 38.00
PAM8610 Amplificador Estéreo 2x15W 12V
1 × $ 38.00 -
×
 Tira Header Macho 40 Pines 2mm Negro
1 × $ 4.00
Tira Header Macho 40 Pines 2mm Negro
1 × $ 4.00 -
×
 Perilla para Potenciómetro Diferentes Colores
1 × $ 2.00
Perilla para Potenciómetro Diferentes Colores
1 × $ 2.00 -
×
 Kit Roboracer STEAM
1 × $ 220.00
Kit Roboracer STEAM
1 × $ 220.00 -
×
 1N5399 Diodo Rectificador 1000V 1.5A
1 × $ 2.00
1N5399 Diodo Rectificador 1000V 1.5A
1 × $ 2.00 -
×
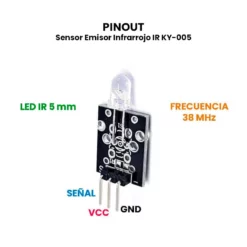
 Sensor Emisor Infrarrojo IR KY-005
1 × $ 17.00
Sensor Emisor Infrarrojo IR KY-005
1 × $ 17.00 -
×
 Sensor de Luz UV 290-390nm (UVA, UVB) RS485 SEN0642
1 × $ 1,376.00
Sensor de Luz UV 290-390nm (UVA, UVB) RS485 SEN0642
1 × $ 1,376.00 -
×
 Filamento PLA+ Glow in the Dark Naranja 1Kg 1.75mm IIIDMAX
1 × $ 508.00
Filamento PLA+ Glow in the Dark Naranja 1Kg 1.75mm IIIDMAX
1 × $ 508.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Bolsa de Sellado al Vacío para Filamentos
Rango de precios: desde $ 129.00 hasta $ 137.00
Bolsa de Sellado al Vacío para Filamentos
Rango de precios: desde $ 129.00 hasta $ 137.00 -
Add
 UNIT DualMCU ONE ESP32 + RP2040
$ 269.00
UNIT DualMCU ONE ESP32 + RP2040
$ 269.00 -
Add
 Protoboard de 400pts y 830pts Blanco o Transparente
$ 27.00
Protoboard de 400pts y 830pts Blanco o Transparente
$ 27.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Llanta Omnidireccional Derecha y Izquierda
Rango de precios: desde $ 114.00 hasta $ 198.00
Llanta Omnidireccional Derecha y Izquierda
Rango de precios: desde $ 114.00 hasta $ 198.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Hélice de 3 y 4 Aspas para Eje 2mm
Rango de precios: desde $ 8.00 hasta $ 10.00
Hélice de 3 y 4 Aspas para Eje 2mm
Rango de precios: desde $ 8.00 hasta $ 10.00



























Valoraciones
No hay valoraciones aún.